Industrial robot grinding technology, with its flexibility, intelligence, and cost-effectiveness, is considered a highly efficient and intelligent alternative for the processing of complex parts, especially compared to current mainstream manufacturing methods. The essence of robotic grinding is to mimic manual polishing; therefore, relying solely on robots is far from sufficient. The industrial robot grinding process determines the quality of the workpiece and production efficiency. This article will briefly introduce the knowledge of industrial robot grinding technology.
1. The Role of Industrial Robots in Grinding Processes
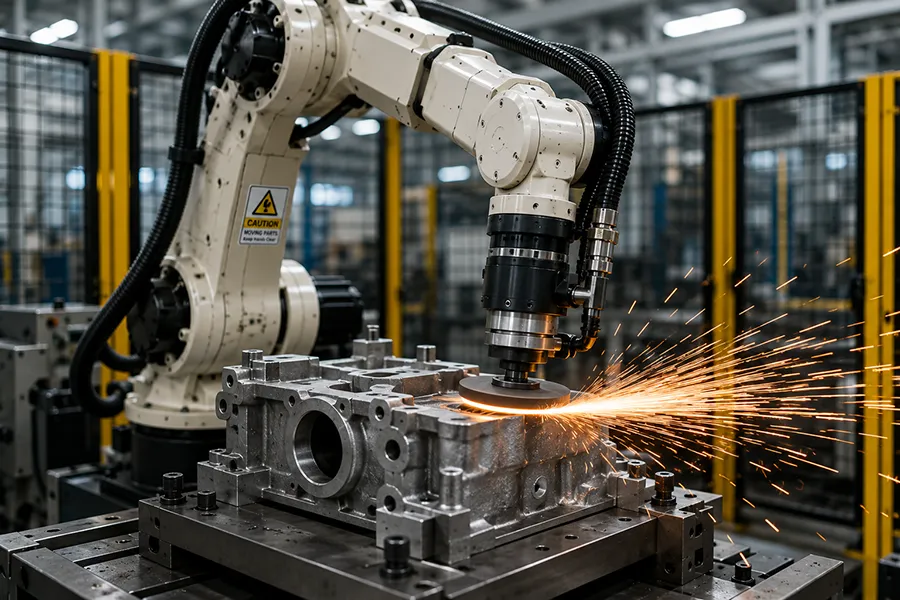
Industrial robots play a potentially significant role in labor-intensive and high-risk work. For example, typical industrial robots have been used in grinding processes. However, the industrial robot grinding process is a complex manufacturing process because current industrial robots still require skilled engineers to adaptively adjust several key grinding process parameters to achieve better grinding quality.
2. Configuration and Application Scope of Robotic Grinding Systems
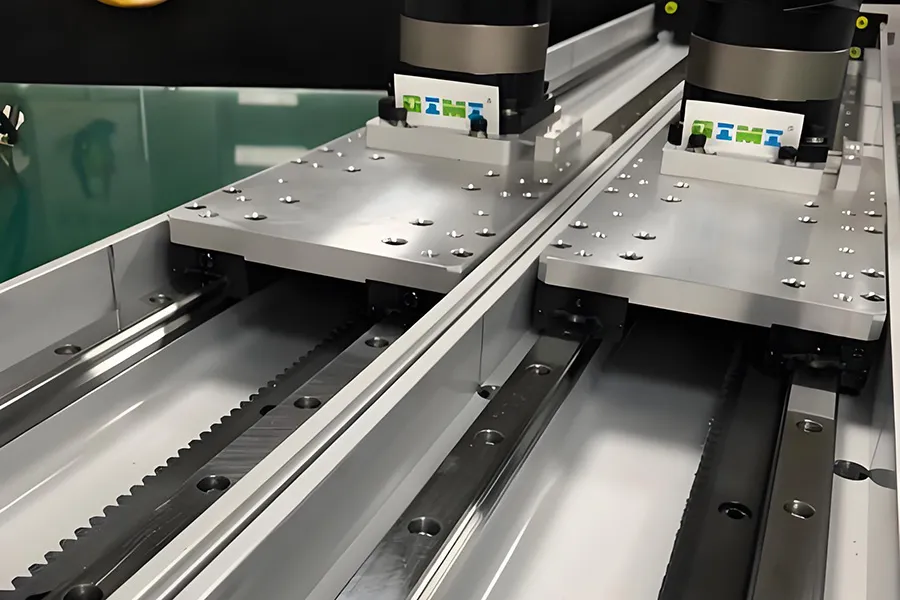
Industrial robot grinding processes utilize advanced cutting software and processing power control technology, along with a complete configuration including spindles, cutting tools, and rotary tables, and can replace manual deburring equipment. Industrial robot grinding processes are primarily used for automated processing of castings, sheet metal parts, sanitary ware, computer laptops, mobile phone casings, etc., for grinding and deburring.
3. Industrial Robot Grinding Process System
Industrial robot grinding processes enable manufacturers to improve the speed and accuracy of grinding parts. By removing employees from potentially hazardous work areas where dust and debris can pose serious health risks, industrial robots reduce these risks, thereby improving worker safety. Grinding operations, including those using industrial robots, can be equipped with flexible force-controlled grinding tools for perfect grinding of parts.
4. Stability Requirements in Robot Grinding Processes
Stability is crucial when using industrial robots to grind workpieces. Stability includes dynamic balance, interference, and belt deviation. To meet the movement requirements of industrial robots, more space should be allowed around the equipment. Delay systems may be added depending on actual production needs.
5. The Role of the Flexible Force-Controlled Sanding System
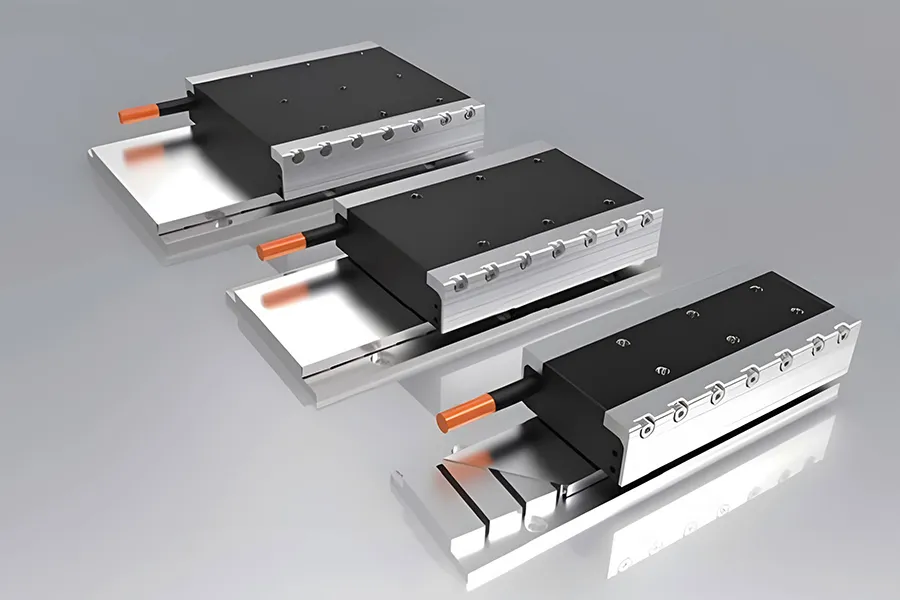
The flexible force-controlled sanding system can compensate for the gravity of the end-effector and precisely output a contact force parallel to the robotic arm’s axis according to work requirements. Simultaneously, this device can adaptively extend and retract based on the contour characteristics of the contact surface, solving the automation challenge between sensitive contact surface processes and rapid contact movement. The robot system controls the sanding path, while the force control system provides flexible, constant force output, ensuring thorough and consistent processing of every surface area, resulting in higher sanding efficiency. It is particularly suitable for use with industrial robots for surface sanding of wood, furniture, musical instruments, etc.
6. The Precision Advantage of the Flexible Force-Controlled Sanding System
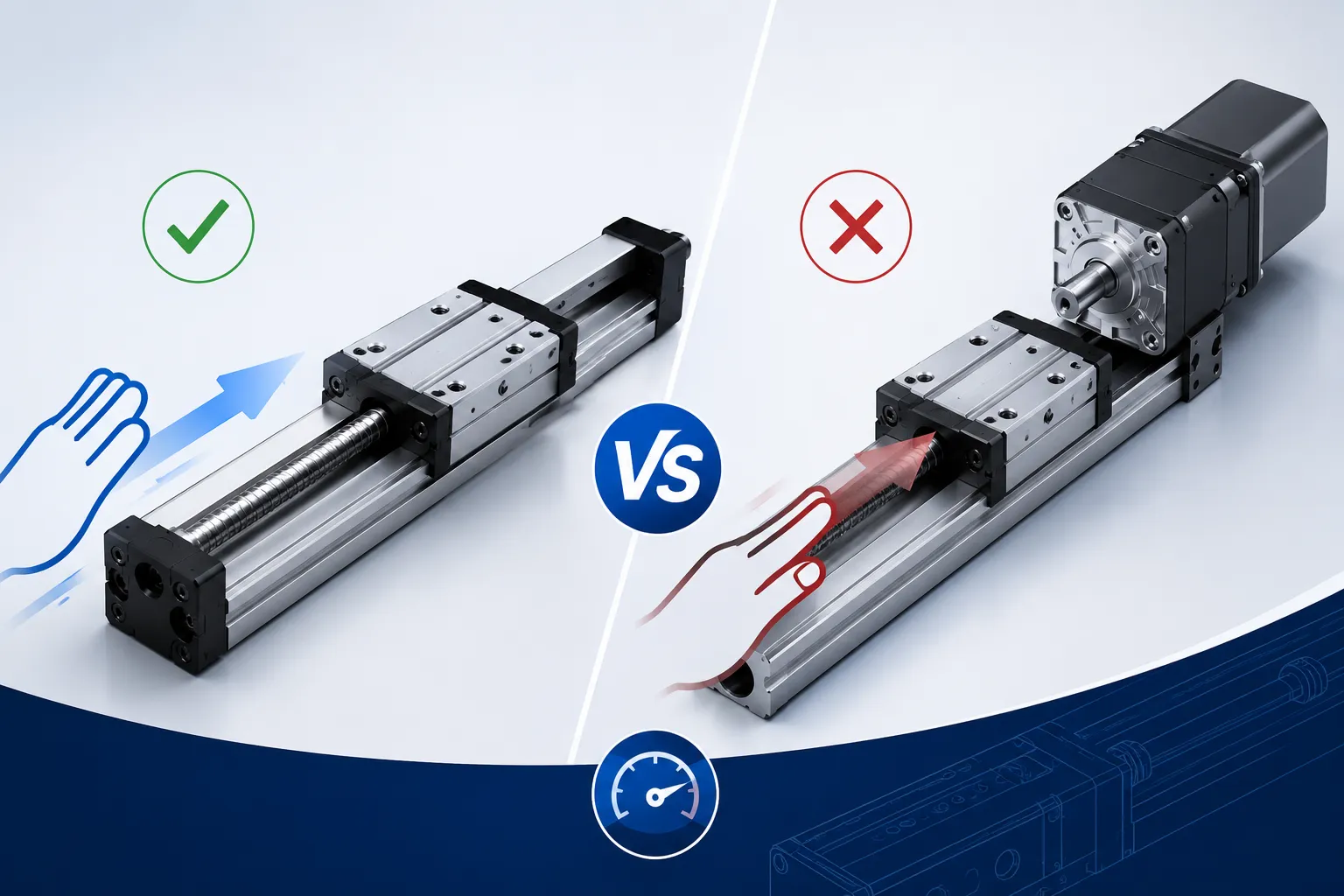
The force control precision of the flexible force-controlled sanding system reaches an astonishing ±1N. This is an extremely small force; a light touch of a finger on a table requires at least 2-3N of force. This force control precision far exceeds that of the human hand. If a robot doesn’t use a flexible force-controlled grinding system and instead directly grips the grinding tool, the grinding force cannot be controlled, and flexible floating is impossible, resulting in a very low yield rate. Furthermore, it places extremely high demands on robot positioning accuracy and debugging processes, making debugging very complicated. Yinglian Technology’s flexible force-controlled grinding system, however, automatically performs flexible control in less than 0.01 seconds by real-time sensing of key information such as force, position, and posture, ensuring constant grinding force.
Stability is crucial when using industrial robots to grind workpieces. Stability includes dynamic balance, interference, and belt deviation. To meet the movement requirements of industrial robots, more space should be left around the equipment. Depending on actual production needs, a delay system may sometimes be required.
Summary
In summary, robotic grinding is a comprehensive automated application integrating robot control, grinding technology, force control technology, vision positioning, fixture design, and safe dust removal. It can significantly improve the consistency of grinding quality, reduce manual labor intensity, increase production efficiency, and improve the workshop environment.